Strategy and Innovation
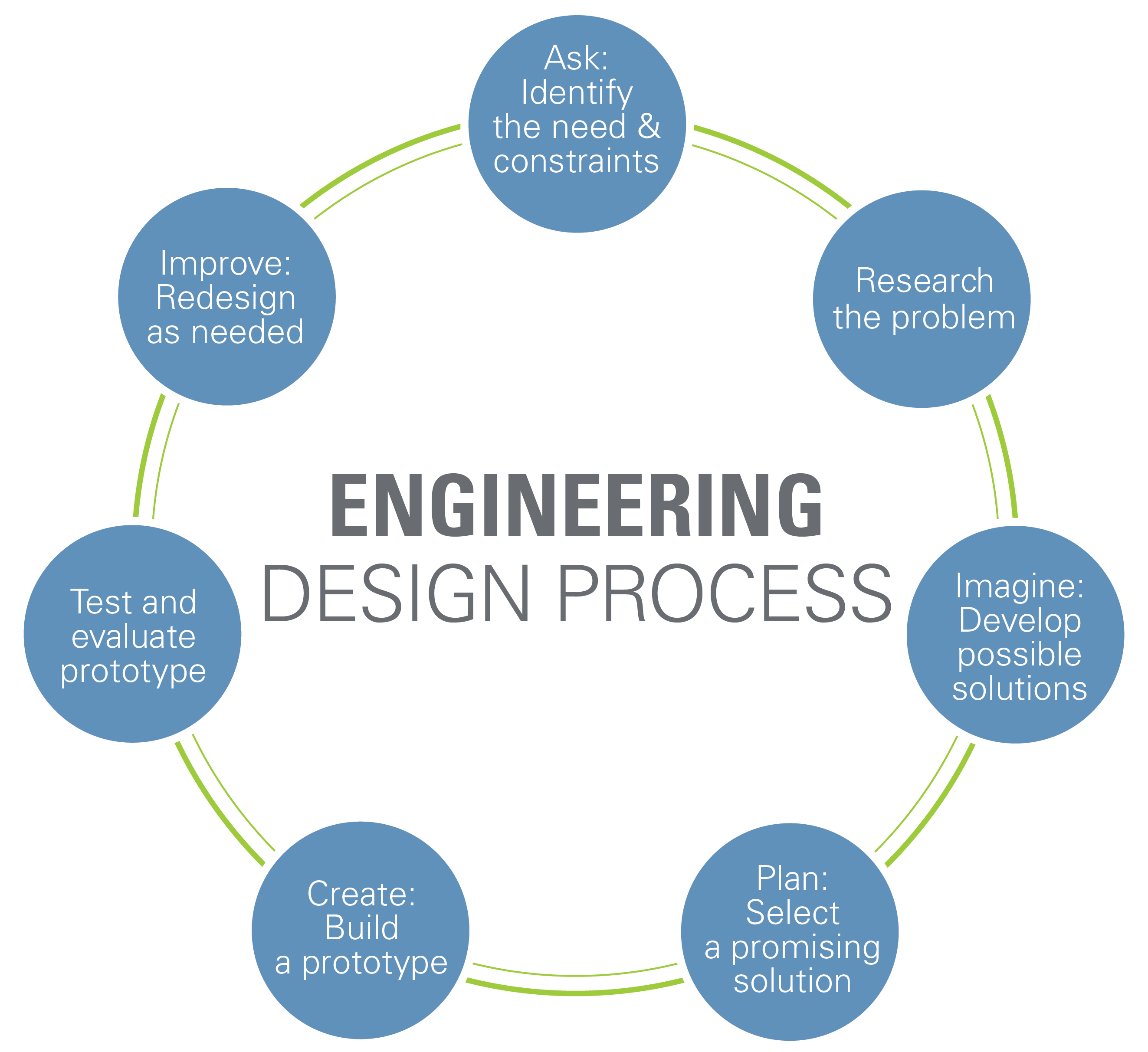
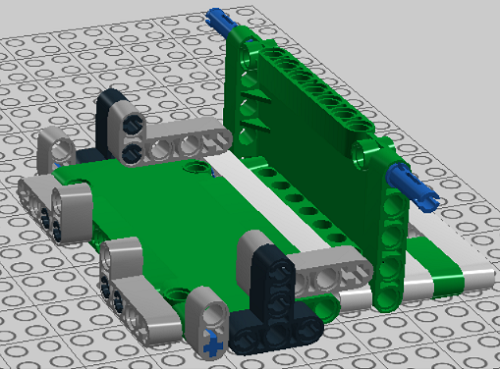
Our general plan was to do fewer missions more accurately through the use of navigation way points and be less dependent on start position. We used the engineering design process for our development: Constraints, Research, Imagine, Plan, Prototype, Test & Evaluate, Redesign & Improve. Use of CAD to archive and share prototypes.
PseudoCode
was used to plan the PID, Square On Line and Point to Point navigation modules. This allowed us to use Bottom Up design by defining the details of the program and then linking them together. To accomplish our goal it was determined through testing that the use of PID Controllers in navigation would provide the best results when combined with light sensors/gyro.
Software development: Top Down Design, by creating a complete understanding of the mission and then building it module by module.
Each mission was its own project containing small programs that each do a simple secton o the mission (turn, drive, manipulator). Once all the small programs run individually in order to complete the mission, they are then combined into one mission program. We also used a functions library of code that could be reused throughout the programs, ie. Stop on black, square on line, PID controller.